About
Research highlights include:
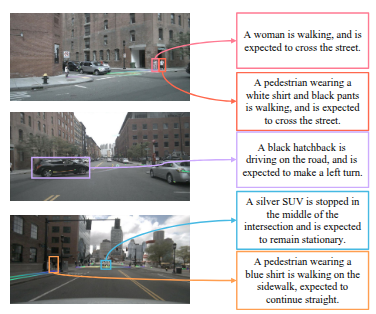
- Saliency-guided foundation models for robotics and autonomous driving
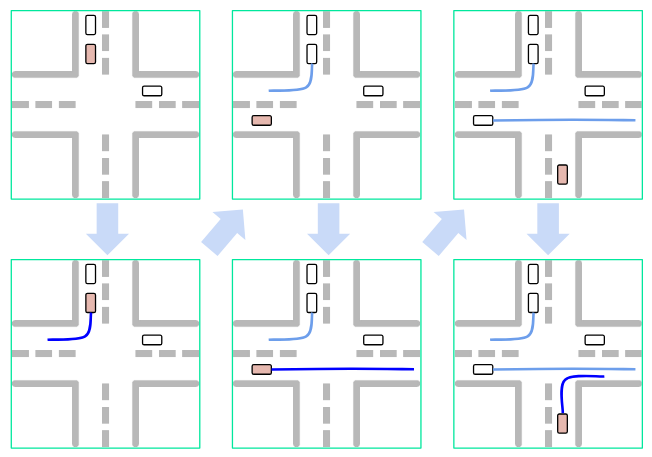
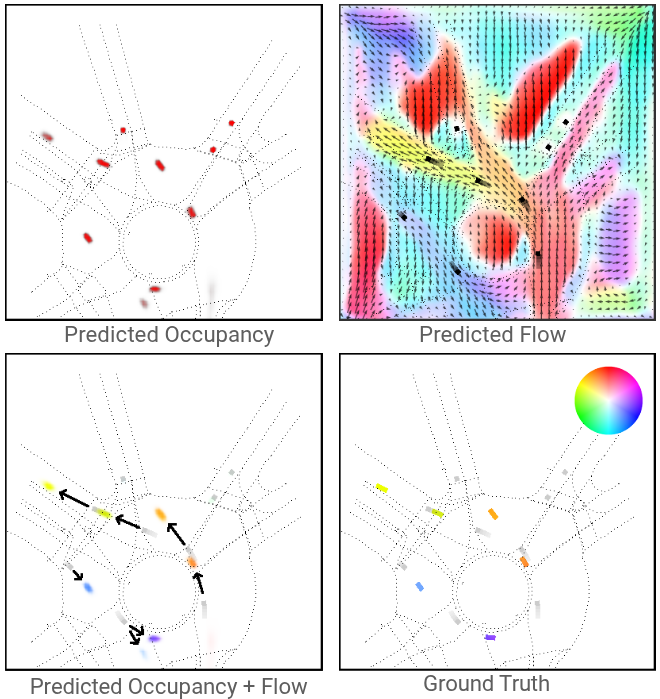
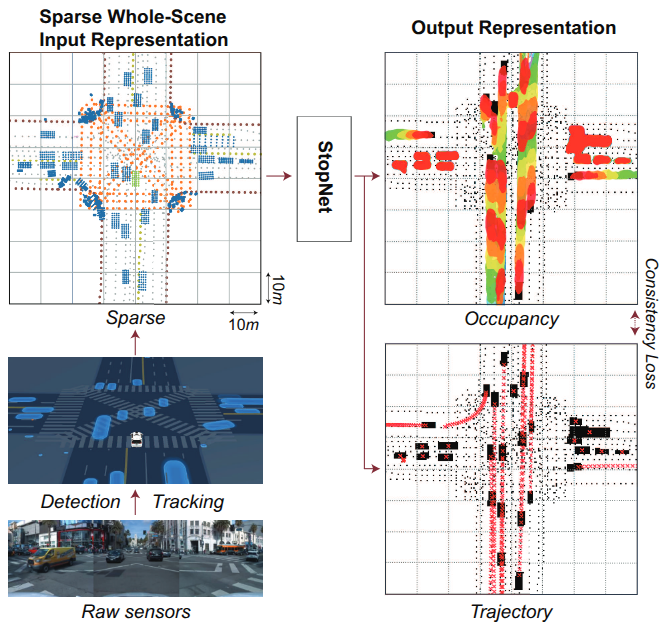
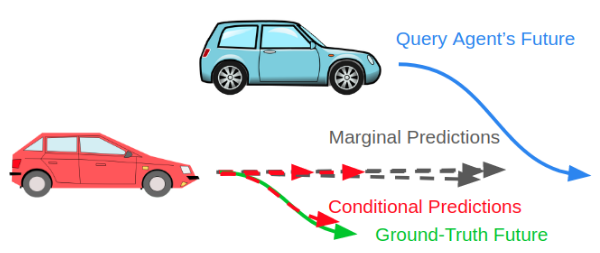
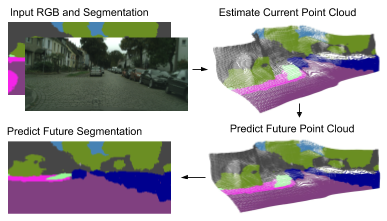
- Occupancy Flow Fields for motion prediction
- Scenario generation for autonomous driving evaluation
- Sample-efficient reinforcement learning for robot table tennis
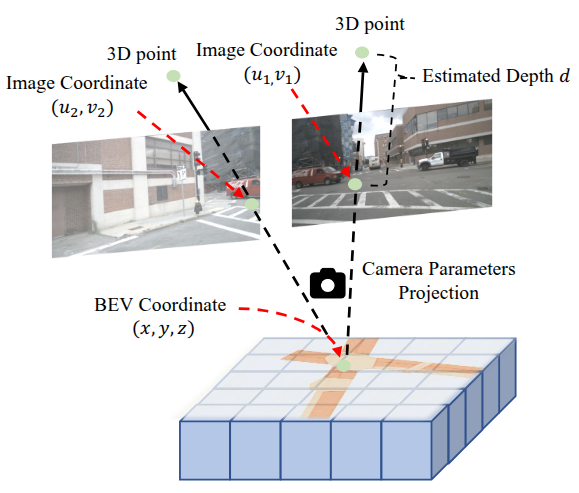
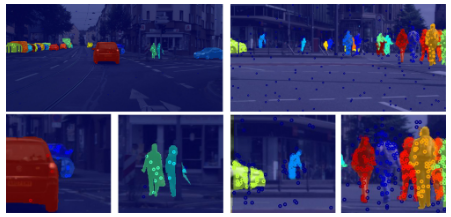
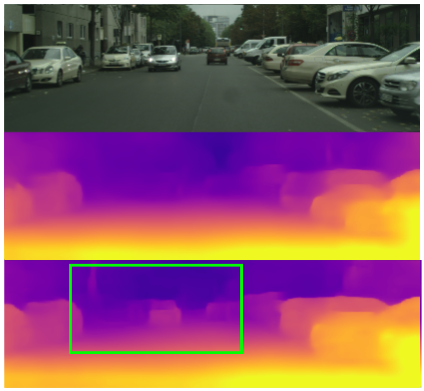
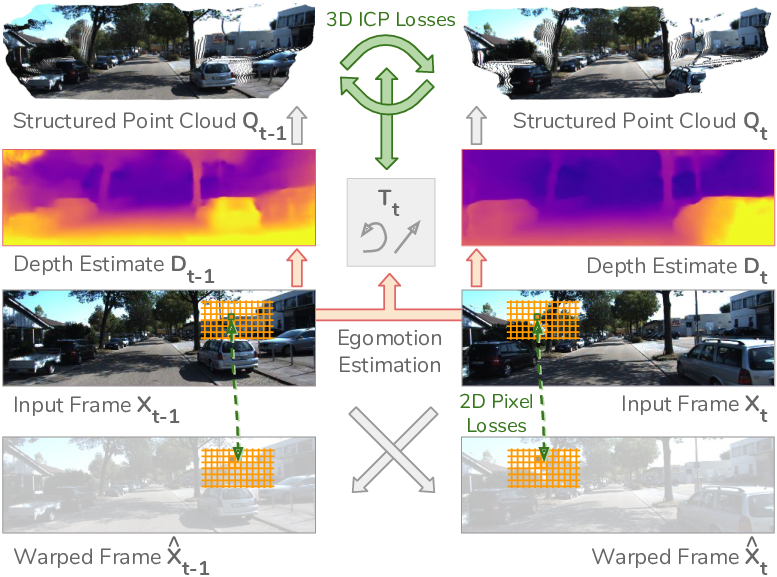
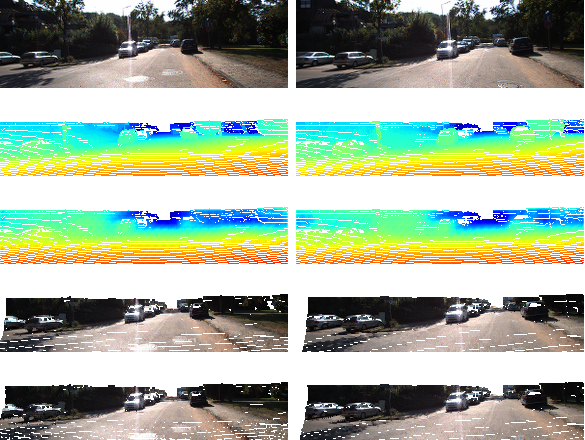
- Self-supervised learning of depth and ego-motion
I have authored 13 patents, and my work has appeared in CVPR, ECCV, ICRA, IROS, and AAAI, receiving 2500+ citations.
I am a Research Scientist at Waymo Research working on foundation models for robotics and autonomous systems. My work focuses on large-scale world modeling, multi-agent prediction, and applying vision and multimodal foundation models to safety-critical AI systems.
Before Waymo, I was a Student Researcher at Google Brain Robotics in Mountain View, where I worked on reinforcement learning and computer vision for robotics. I also interned at Google four times, working on robotics, self-supervised learning, and large-scale machine learning systems.
I got my PhD in Computer Science from UT Austin, where I worked on reinforcement learning and robotics. I got my Master's in Computer Science from University of Florida, working mostly on theoretical computer science and approximation algorithms. I got my Bachelor's degree in Computer Engineering from Sharif University of Technology.
Before graduate school, I worked as a software engineer. I was the lead developer for a startup, co-founded a startup developing custom database applications for large companies including automakers, and created a lightweight web framework open-sourced in 2002.
A talk on my work on sample-efficient reinforcement learning of robot table tennis using self-play.
High-resolution videos are available on the project website.